【图像处理】轮廓及其相关属性
轮廓
轮廓就是一群连续的点组成的曲线,用来进行形状分析、目标检测与识别。
- 使用二值图像获取更好的精度,所以在应用轮廓检测之前进行阈值化处理或边缘检测;
- 在Opencv中,轮廓检测是从黑色背景中检测白色物体。
查找轮廓
使用cv2.findcontours()查找轮廓
1 | import numpy as np |
cv2.findcontours()有三个参数:
- 第一个是输入图像,为经过阈值处理或边缘检测的二值图像。
- 第二个是轮廓查找方式,有四种:(RetrievalModesand轮廓层级)
- cv2.RETR_EXTERNAL 表示只检测外轮廓
- cv2.RETR_LIST 检测的轮廓不建立等级关系
- cv2.RETR_CCOMP 建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
- cv2.RETR_TREE 建立一个等级树结构的轮廓。
- 第三个是轮廓逼近方法,有四种:(ContourApproximationModes
)- cv2.CHAIN_APPROX_NONE 存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
- cv2.CHAIN_APPROX_SIMPLE 压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
- cv.CHAIN_APPROX_TC89_L1 和 cv.CHAIN_APPROX_TC89_KCOS 应用Teh-Chin链逼近算法的一种风格。
有三个返回值:
- image是原来的二值化图片;
- contours是找到的轮廓,以数组的形式储存;
- hierarchy是轮廓间的层级关系
绘制轮廓
采用cv2.drawContours
1 | img = cv2.drawContours(img, contours, -1, (0,255,0), 3) |
一共有五个参数:
- img 即源图像,作图的画布
- contours 是储存轮廓的数组
- 轮廓的索引,-1表示绘制所有的轮廓,0表示第一个,以此类推
- BGR表示的颜色,轮廓的颜色
- 轮廓的像素值
更多情况下,先获取所需的轮廓,再进行绘制
1 | cnt = contours[1] |
轮廓特征
用于计算轮廓的特征,如面积、周长、最小外接矩形等。
面积
1 | area = cv2.contourArea(cnt) |
这是用几何方法计算轮廓的面积,有小数。如果统计二值图中像素点的个数,可以使用area = cv2.contourArea(cnt)
周长
1 | perimeter = cv2.arcLength(cnt, True) |
第二个参数表示轮廓是否闭合,闭合为True
图像矩
1 | M = cv2.moments(cnt) |
计算图像的各种几何特征,详细参考
计算质心
1 | cx, cy = M['m10'] / M['m00'], M['m01'] / M['m00'] |
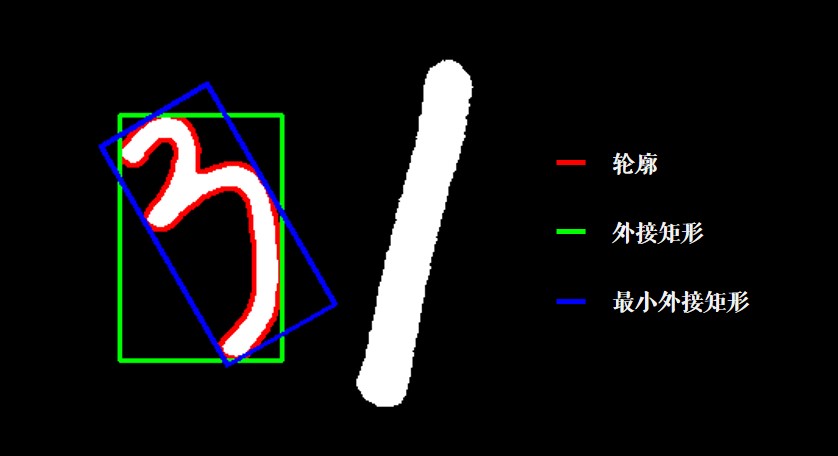
外接矩形
外接矩形有两种,如下图,绿色为不考虑旋转的外接矩形,蓝色是最小外接矩形。
1 | # 外接矩形 |
外接圆
1 | # 最小外接圆 |
拟合椭圆
1 | ellipse = cv2.fitEllipse(cnt) |
形状匹配[2]
cv2.matchShapes()检测两个轮廓间的相似度,返回值越小,越相似
多边形逼近[2]
cv2.approxPolyDP()用于多边形逼近
1 | approx = cv2.approxPolyDP(cnt, 3, True) |
第二个参数是多边形轮廓接近实际轮廓的程度,值越小,越精确;第三个参数表示是否闭合
凸包[2]
cv2.convexHull()
点到轮廓的距离[2]
cv2.pointPolygonTest()计算点到轮廓的最短距离,也就是垂线。
reference

评论
